01引言
水下环境复杂多变,极大限制了水下作战装备的发展运用。水下无人航行器(UnmannedUnder⁃waterVehicle,UUV)因其广阔的应用前景和多样化的军事用途已成为世界各国海军争相发展的重要装备。UUV可执行水下探测、隐蔽侦察、搜索定位、通信中继、反潜战、猎扫雷、水下设施布放等多种任务,将在未来海战场发挥不可替代的作用[1]。区别于早期重点研究单个UUV个体经由有人平台的运载、发射、控制及使用等问题,随着人工智能、大数据以及新型通信、导航、指挥控制技术的飞速发展,聚焦多个UUV的水下无人集群(UnderwaterUnmannedSwarm,UUS)逐渐被各界重视,并作为一种新的装备运用形态快速发展起来[2]。
无人系统是影响未来战争制胜机理的颠覆性技术,而集群化是无人系统的重要发展方向。无人集群(UnmannedSwarm)的概念最早应用于无人机,随着人工智能、无线自组网及导航技术的发展,多无人机可以聚合起来构成能够一起完成给定任务的共同体[3]。水下无人集群是指由多个具有一定自主决策能力、彼此之间存在指挥控制和通信关系,且共同承担给定使命任务的水下无人平台所构成的群组。随着水下无人平台自主性和对外互操作能力的提升,水下无人集群正呈现出效率高、成本低、可重构、可执行多任务等特点。美军最早开展水下无人集群的研制和应用,并于2011年11月颁布了《海军科学技术战略规划》,首次构想建立包含无人系统在内的混合部队。2014年,美智库发布《战场机器人:即将到来的蜂群》报告,系统提出了无人系统蜂群战术,并先后开展了多个水下无人集群应用项目的研究及试验验证。在未来水下作战中,应用水下无人系统集群可增大水下侦察搜索范围,提高反应速度与协同效果,对于实现装备技术跨越式发展有重要意义[4~5]。本文通过对外军典型水下无人集群应用的分析,重点讨论包含协同通信、协同导航定位、协同探测及协同指挥控制[6]等在内的集群关键技术,并对国外水下无人集群的发展趋势进行了分析。
02外军典型水下无人集群系统发展现状
2.1分布式敏捷反潜系统
美国防高级研究计划署(DARPA)研发的“分布式敏捷反潜系统”,旨在研究验证利用水下无人系统进行反潜作战的效能[6]。该项目计划利用数十个水下无人潜航器潜伏在水下6000m的海底并组成颠覆性反潜网络,用于监视180000km2水域内敌方水下有人作战平台的活动,可实现水下大范围跟踪探测。
2.2自主水下航行器协同感知控制(CO3AUVs)项目
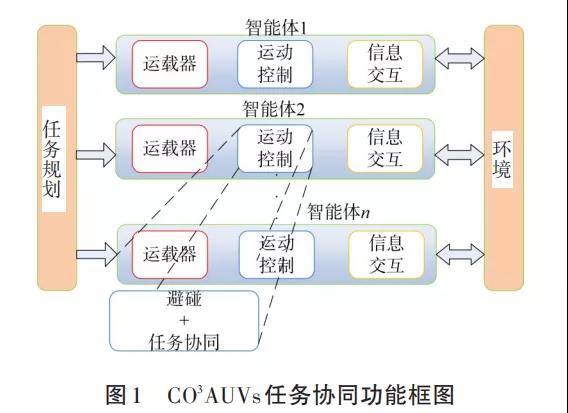
CO3AUVs项目是一个欧盟委员会资助的多国合作项目[7],隶属于欧盟第七科技框架计划(FP7)中“信息和通信技术”的“认知”专题。其目标是研发和实现适用于多AUV协调和协同控制的高级认知系统。重点突破水下机器人协同感知与建模技术、受约束的水下协同通信技术、多AUV协同控制策略、编队避碰及协同路径跟踪技术、测海及地磁导航技术等。
2.3濒海持续水下监控网络(PLUSNet)
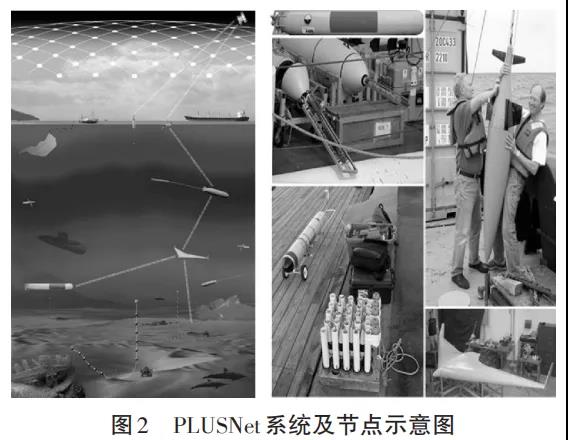
持续濒海水下监控网络是一个异构水下无人平台集群研究项目[8],如图2所示。该项目以导弹核潜艇为母体平台,由多个UUV、水下滑翔机等异构水下无人平台为活动节点组成大规模的有线与无线集成网络。其中,水下活动节点携带半自主传感器,水下由水声向其他节点传输数据,水面通过无线电与舰船和岸基节点通信,并能够自主执行多种任务,做出基本决策,可有效监视的水下区域高达数万平方公里,是当今世界最先进的水下监视网络计划之一。
2.4自主海洋取样网络(AOSN)
20世纪90年代,美国开发的“自主海洋取样网络”进行了初步应用试验。2003年,美国继续开展“自主海洋取样网络II”的研究工作。该网络由若干网络节点组合形成,每个网络节点由一个系留的水面浮标和若干艘自主式无人潜航器组成。该网络系统具备全向性覆盖、自适应采样、灵活控制、能量管控及关键部件失效的鲁棒性等。
03水下无人集群典型应用
3.1情报、监视、侦察任务(Intelligence,Surveil⁃lance,andReconnaissance,ISR)
水下无人集群ISR任务主要包含如下作业:1)持久稳定地战术情报收集,包括水声信号、电信号、测量信息、图像以及海洋、气象学信息等;2)化学、生物、核能、放射性物质以及爆炸物搜索与定位;3)近岸及港口监视;4)后方部署监视声纳或声纳阵;5)地图绘制及目标探测与定位。
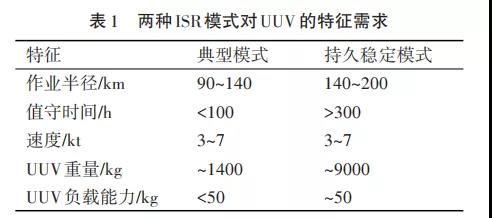
水下无人平台种类繁多,执行ISR任务前编队应明确需求择优选取个体。ISR任务一般分为典型模式及持久稳定模式,这两种不同的ISR模式对UUV需求不同,每次任务根据需求进行编队构建,具体如表1所示[9]。
执行ISR任务时,无人集群以一定队形在作业区域航行,在预定时间内执行相应的情报收集任务,且可根据作业需求进行重新配置,在收集情报的同时规避风险。
3.2反水雷(MineCountermeasures,MCM)
反水雷目的为发现并销毁水雷,为我方水面、水下有人平台保驾护航。由于一套成功的反水雷系统需要在一小时内清除至少约18km2才算达成目标[9],仅依靠单个UUV不可能完成,因此需水下无人集群编队配合作业来实现。在执行反水雷任务时,需要迅速设立水下无人集群安全操作区域以及航行路线,进而对任务区域进行排查。水下无人平台反水雷作业区域一般为300km2~3000km2,最大作业时间约7~10天[9],可覆盖深水雷区乃至海军陆战队近岸作业区域。MCM任务一般包括:1)侦察(水雷侦察、分类、识别、定位);2)清除水雷(水雷中和或引爆);3)机械及电磁扫测;4)保护(诱骗、干扰)。
在进行反水雷战时,首先布放无人集群至任务区域,无人集群利用自身传感器获取的各类信息,对任务区域快速搜索路线进行决策;同时利用我方沿岸军舰作为网络中继点实现岸上、水面情报收集,综合水下、水面、岸上信息。
3.3反潜战(Anti-SubmarineWarfare,ASW)
ASW任务主要目的为监视敌方潜艇动态,使我方水面、水下编队对其实现有效规避或打击。水下无人平台在反潜战中主要达到以下目的:1)监视敌方潜艇进出港;2)清除航母编队及远征部队作业区域,远离敌方潜艇威胁;3)清除航母编队及远征部队航路区域,远离敌方潜艇威胁。
水下无人集群在敌方军港执行潜艇进出港任务时,通过水面船舶或潜艇在安全海域布放。无人集群在敌潜艇出港之前自主航行至任务区域,通过多个小UUV协同,建立起一个可维护数日的巡逻栅栏执行反潜任务。
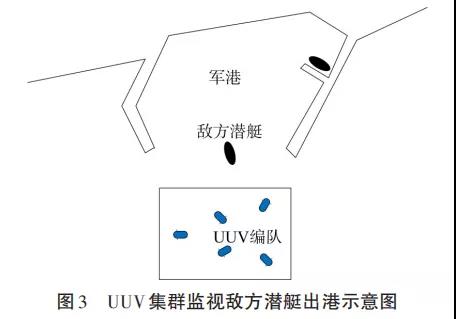
监视敌方潜艇动态还可通过部署如图3所示集群实现。采用集群探测可获取敌方潜艇信息,包括位置、路线以及速度等,这些信息可通过UUV集群中的通信中继个体实现近乎实时的回传。
保护作业区域以及航路远离敌潜艇威胁是水下无人集群执行反潜作业的另一项重要任务。水下无人集群探测到敌方潜艇后对其进行分类,随后报告目标位置。根据实际需求,还可对目标进行跟踪,进而不断更新目标位置等信息。
04水下无人集群关键技术
4.1协同通信技术
协同通信技术解决水下无人集群内部(UUV之间)、集群与外部(UUV与水下固定通信节点之间以及UUV与水下有人作战平台之间)的多业务信息传输与共享问题。目前UUV主要依靠无线电通信、水声通信及光通信三种手段[10]。无线电通信通信带宽宽、速率高、业务量大,主要用于水面、对空及空间通信,但在海水中衰减严重,水下平台适用的甚低频、超低频等通信手段速率低,且以广播通信模式为主,不能满足水下无人集群双向通信、频繁交互的需求;UUV配备的卫星通信天线适用于UUV浮出水面对外快速通信。
水声通信以声波为载体,声信号在海水中衰减小,是理想的水中通信手段。经过多年发展,外军在UUV水声通信方面取得了较大进展,并成功地在多型UUV上应用。考虑水声环境复杂性对通信效果的影响,要充分发挥水声通信在水下无人集群中的作用,后续还需突破环境适应性、基于孔径和功率控制技术的通信隐蔽性设计、带宽受限下的高速编码及指令集设计等。
蓝绿光波段在海水中穿透能力可达数百米,具有较好的方向性、较高的工作频率以及较宽的通信频带,且不受电磁辐射和核辐射影响,暴露概率极低,可极大提高水下平台的隐蔽性及安全性。20世纪70年代美国就开始论证蓝绿激光对潜通信,80年代以来进行了多次试验并取得了良好效果,实验室条件下传输速率高达1Gbps[11],可以避免上行光路受太阳光等背景噪声干扰等问题,较机载蓝绿激光对潜更适合水下集群。但考虑到激光通信系统的复杂性,后续还应不断优化体积重量及加装适应性。
4.2协同导航技术
协同导航技术用以确定水下无人集群中各节点间相对位置关系。水下无人集群协同导航主要通过对等式协同导航和层级式协同导航两种技术途径实现。对等式协同导航要求集群内各个机动无人节点都装备有高精度的导航定位设备,且在导航功能方面具有相同的配置和能力;使用中各节点利用自身设备进行导航定位,并在集群内互通共享自身位置信息。层级式协同导航只需在集群中设置少数无人机动节点并装备高精度导航定位设备,而其他节点则可装备相对低精度的导航设备;使用中前者在进行自定位并获取群内节点相互位置关系后,可通过在群内广播相关位置信息,促使后者提高自身定位精度。
水下无人集群协同导航技术发展重点为以下两个方面:一是水中信道传播延迟对协同定位计算的影响[12]。声速较光速低,水声信道传播存在较大延迟,在集群内各节点存在相对运动的状态下,对相关节点的测距和位置信息接收需重点考虑声信号的传播延迟,以确保协同定位的精度。二是基于不同节点拓扑结构的导航算法[13]。一种思路是将传统的基线概念引入水下无人集群,考虑集群内不同节点之间构成的空间拓扑,计算并确定各节点之间的相对位置;另一种思路则是在可能的情况下,将具备协同条件的其他有人节点引入到水下集群定位中来,构成相对理想的基线类型,从而设计相应的导航算法。
4.3协同探测技术
水下无人集群通过协同探测技术可扩大探测范围、提高探测效率,为水下攻防作战中的侦察、识别、跟踪及监视等任务提供支撑。
水下无人集群的多个机动节点通过水声链路组网连接后,可以形成一个分布式探测网络,当网络中任一节点发现疑似目标后,可请求网内其它节点进行协同探测。通过多个节点获得的多角度、多方位目标信息可以有效提高目标探测概率;多节点所具备的并行性、冗余度可提升集群容错能力;融合处理后的多节点测量数据可有效判决目标是否存在。上述集群特征对克服海洋声场环境复杂多变、目标辐射噪声快速衰减,提高水下目标探测的准确性有重要意义[14]。
水下无人集群协同探测除需关注水声建模和自适应采样等基础技术之外,还需突破自主式探测、识别及数据融合相关技术,包括自主式传感器干扰背景平滑处理技术、恒虚警检测技术、双/多基地合成孔径技术、多自主式节点传感器信息时空统一与数据融合技术、网络信息融合技术等[15]。
4.4协同指挥控制技术
水下无人集群协同指挥控制技术主要解决信息综合处理、威胁判断、决策以及路径规划等问题;在水下有人平台管控下,主要解决对有人平台任务分配及路径规划信息的接收、处理与执行。无人集群指挥控制关键技术主要为以下两点。
1)无人集群指挥控制架构设计技术
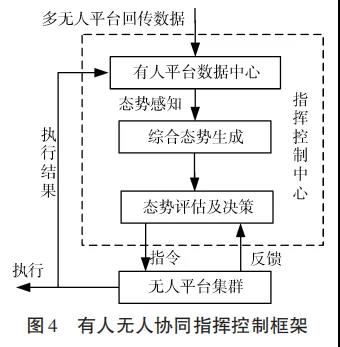
科学合理的指控架构都是促进信息处理、决策以及高效执行的重要基础。根据对当前人工智能技术发展及其在水下集群中应用效果的预期,有人-无人集群仍将是未来一段时期内装备研发与运用的主要形式。图4是一种典型的有人无人协同指控框架。
2)任务规划技术
任务规划技术包含任务分配与航路规划两部分。对于自主决策的无人集群,任务规划根据获取的环境信息、目标情况及自身动力性能等参数及约束条件,为集群内各节点分配探测、通信以及打击等具体任务,并合理规划出可能的多条备选路径。有人-无人协同集群则只需根据确定的集群指控架构及由此而确定的指挥与信息关系,由无人集群中的通信中继主节点接收有人平台的任务分配指令与路径规划信息,执行即可;或集群内全部无人节点同步接收来自有人平台的指令及信息并执行。
05国外水下无人集群发展启示
5.1无中心、自组织、复合分布式架构
目前无人系统集群多采用集中式架构,如宾夕法尼亚大学“格拉斯帕”(GRASP)实验室研发的无人机集群,采用集中式规划与分布式控制相结合的集中式架构,通过集中式的人机交互进行目标分配,建立分布式状态估计和控制系统,实现无人机集群运动。但环境约束条件和装备技术发展水平两方面因素正在改变着水下无人集群体系架构的发展方向。一方面,受特殊的水下环境的约束,信息传输、导航定位可达性限制了集群的稳定运作,由于集中式控制模式更强调核心控制节点的作用,所以从无论从长远还是现实角度来看都不适合水下集群;另一方面,随着水下单无人平台智能水平的提高和开放式架构的引入,水下无人集群系统的体系架构也具备了从集中式向无中心、开放式、自适应、自组织、强鲁棒性的复合分布式方向发展的条件。
5.2多维度水下空间作战应用
未来水下无人集群的应用前景主要如下:1)协同搜索,即多个无人系统配置不同传感器实现对区域的无缝覆盖和目标的检测与跟踪;2)协同干扰,即多无人系统搭载对抗载荷从不同的位置和角度欺骗、干扰和压制对方探测装备;3)协同攻击,即多个无人装备在协同状态下从多个攻击阵位及攻击角度对单个或多个目标进行火力齐射;4)协同察/打,即与其他无人系统传感器进行目标交叉提示,实现无人系统集群“传感器-射手”快速打击;5)集群对抗,即在双方军事装备与技术发展到一定程度时,开展的水下无人集群之间的大规模对抗。
5.3有人-无人协同水下分布式网络中心战体系
高效能的水下无人集群将是未来水下空间交战的重要力量,但技术发展水平又使得在一定时期内无人集群的使用离不开有人平台的控制。因此,无人装备与有人装备组成混合编队可以弥补当前无人装备智能化水平难以应对复杂战场的缺陷,而且可以实现优势互补。美军认为,未来水下有人作战平台将转变为协同作战平台,大型水下航行器和其他可部署的水下无人系统更多地执行敌海域情报收集、对陆攻击、反舰作战等战术行动。美军目前正积极在核潜艇上搭载UUV、小型无人飞行器,用以支援两栖作战和联合作战。未来将形成“水下网络中心战”体系,即以水下有人作战平台为水下C4KISR中心,综合利用水下传感器、水下通信设备、UUV及其集群等核心装备,在保证水下平台隐蔽性、安全性的前提下,增强水下战场透明度,提高战场感知、决策和打击能力,从而最大限度地发挥水下体系作战效能。
06结语
水下无人系统集群能够以数量优势弥补单一平台功能不足的缺陷,以多数量、小尺寸、低成本的分布式无人作战平台替代传统昂贵的大型有人作战平台,可在水下勘探、侦查、对抗打击等任务中发挥巨大作用,对未来海战具有重要意义。从水下无人集群的几种典型应用可以看出,水下协同通信、导航、探测、指挥控制技术等,是开发高水平水下无人集群亟待突破的关键技术。在未来水下战中,可充分利用水下无人集群形成规模优势,并在此基础上发展有人-无人协同作战系统,可以更好地完成对抗环境下的多维度水下空间作战任务。
【参考文献】
[1]石剑琛.无人系统在未来海战场中的应用构想[J].舰船电子工程,2017(12):5-8.[2]黄亮,王智勇,李海岩.美海军无人潜航器的发展与应用[J].舰船电子工程,2018(9):13-15.
[3]DOD.UnmanndeSystemsIntegratedRoadmap,FY2013-2038[R].WashingtonDC:DOD2013.
[4]钱东,赵江,杨芸.军用UUV发展方向与趋势(上)——美军用无人系统发展规划分析解读[J].水下无人系统学报,2017,25(1):1-30.





 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 